
TB6600 Έκδοση αναβάθμισης 4.0A 42V DC 32 Υποδιαίρεση 42/57/86 Οδηγός βηματικού κινητήρα
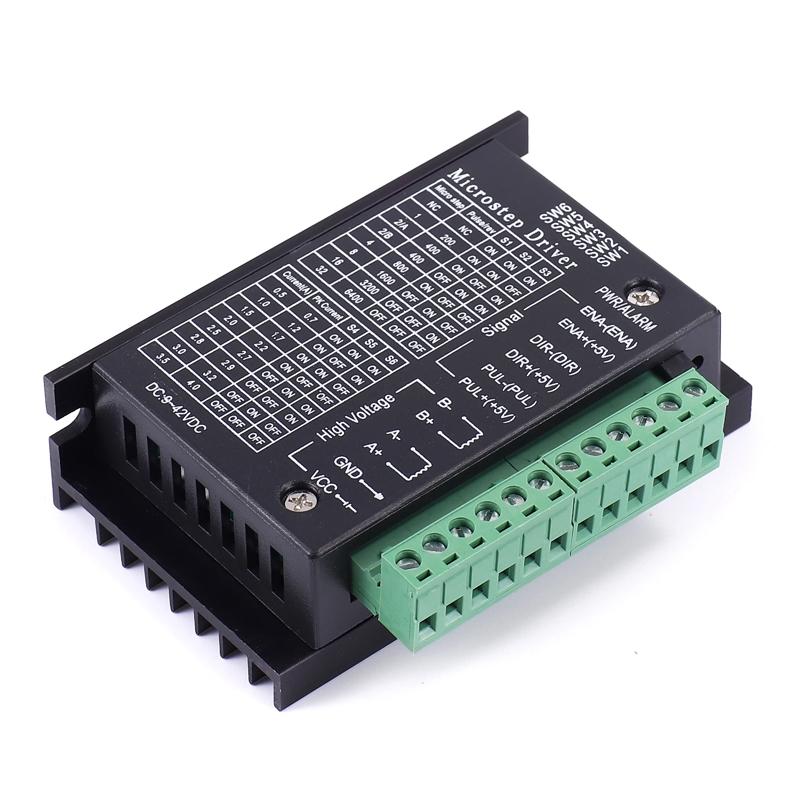









1. Τροφοδοτικό 9V-40V DC
2. Διπολικός οδηγός ρεύματος σταθερής φάσης H-γέφυρας
3. Επιλογή ρεύματος εξόδου έως και 4,0A οκτώ εξόδων
4. Επιλογή 6 τρόπων υποδιαίρεσης έως και 32 υποδιαιρέσεων
5. Υψηλής ταχύτητας οπτική απομόνωση σήματος εισόδου
6. Τυπική διεπαφή κοινού θετικού μονού παλμού
7. Λειτουργία offline hold
8. Ημίκλειστο περίβλημα για πιο απαιτητικά περιβάλλοντα
9. Παροχή λειτουργίας ημιαυτόματου κλειδώματος ρεύματος εξοικονόμησης ενέργειας
10. Ενσωματωμένη προστασία από τη θερμοκρασία και προστασία από υπερένταση ρεύματος
11. Εφαρμοστέος βηματικός κινητήρας: 42, 57, 86 τύπου 2-φασικός 4-φασικός (4 σύρματα 6 σύρματα 8 σύρματα)
12. Βάρος: περίπου 201g
Περιγραφή ορισμού ακροδεκτών καλωδίωσης:
-Ακροδέκτης εισόδου σήματος:
1. CP+: θετικός ακροδέκτης εισόδου παλμικού σήματος
2. CP-: αρνητικός ακροδέκτης εισόδου παλμικού σήματος
3. DIR+: θετικός ακροδέκτης ελέγχου του κινητήρα προς τα εμπρός και προς τα πίσω
4. DIR-: αρνητικός ακροδέκτης ελέγχου του κινητήρα προς τα εμπρός και προς τα πίσω
5. EN+: θετικός ακροδέκτης ελέγχου του κινητήρα εκτός σύνδεσης
6. EN-: αρνητικός ακροδέκτης ελέγχου του κινητήρα εκτός σύνδεσης
-Σύνδεση περιέλιξης κινητήρα:
1. A+: συνδέστε τη φάση περιέλιξης του κινητήρα A+
2. A-: συνδέστε τη φάση περιέλιξης του κινητήρα A-
3. B+: συνδέστε τη φάση περιέλιξης του κινητήρα B+
4. B-: συνδέστε τη φάση περιέλιξης του κινητήρα B-
-Συνδέσεις για την τάση λειτουργίας:
1. VCC: Θετική τροφοδοσία DC ( σημείωση: 10V <VCC <42V)
2. GND: Αρνητική τροφοδοσία DC
Η διεπαφή σήματος εισόδου έχει δύο μεθόδους σύνδεσης: οι χρήστες μπορούν να χρησιμοποιήσουν τη μέθοδο σύνδεσης κοινής ανόδου ή τη μέθοδο σύνδεσης κοινής καθόδου ανάλογα με τις ανάγκες
1. Σύνδεση κοινής ανόδου: συνδέστε τα CP+, DIR+ και EN+ στην τροφοδοσία ρεύματος του συστήματος ελέγχου, εάν η τροφοδοσία ρεύματος είναι +5V, τότε μπορεί να συνδεθεί απευθείας, εάν η τροφοδοσία ρεύματος είναι μεγαλύτερη από +5V, τότε είναι απαραίτητο να προστεθεί μια άλλη εξωτερική αντίσταση περιορισμού ρεύματος R, για να εξασφαλιστεί ότι ο εσωτερικός οπτικός συζεύκτης του οδηγού μπορεί να παρέχει ρεύμα οδήγησης 8-15mA. παλμικό σήμα εισόδου μέσω της πρόσβασης CP- αυτή τη στιγμή, DIR-, EN- στο χαμηλό επίπεδο ενεργού
2. Σύνδεση κοινής καθόδου: συνδέστε τα CP-, DIR- και EN- με τη γείωση του συστήματος ελέγχου (SGND, απομονωμένη από τη γείωση της τροφοδοσίας). το σήμα εισόδου παλμού +5V προστίθεται μέσω του CP+- αυτή τη στιγμή, τα DIR+ και EN+ είναι ενεργά σε υψηλή στάθμη. η τιμή της αντίστασης περιορισμού ρεύματος R είναι η ίδια με εκείνη της σύνδεσης κοινής ανόδου
3. Σημείωση: ο ακροδέκτης EN μπορεί να μην είναι συνδεδεμένος, ο ρότορας του κινητήρα βρίσκεται σε ελεύθερη κατάσταση (κατάσταση εκτός λειτουργίας) όταν το EN είναι έγκυρο, τότε μπορείτε να περιστρέψετε χειροκίνητα τον ρότορα του κινητήρα για να κάνετε τη ρύθμιση που σας ταιριάζει. αφού ολοκληρωθεί η χειροκίνητη ρύθμιση, θέστε το EN σε άκυρη κατάσταση για να συνεχίσετε τον αυτόματο έλεγχο
ΠΡΟΣΟΧΗ στο προϊόν αναφέρεται η διαθεσιμότητα η οποία αναλύεται ως εξής:
Σε απόθεμα: Αφορά τα προϊόντα που διαθέτουν έστω και ένα τεμάχιο υπόλοιπο.
Κατόπιν παραγγελίας: Αφορά τα είδη που δεν είναι διαθέσιμα και θα συμπεριληφθούν στην επόμενη προγραμματισμένη εισαγωγή εφόσον προχωρήσετε σε παραγγελία. Χρόνος αποστολής της παραγγελίας σας 7-15 εργάσιμες ημέρες. Σε αυτό το διάστημα δεν συμπεριλαμβάνετε ο χρόνος αποστολής της μεθόδου αποστολής που έχετε επιλέξει.
Για να σας αποσταλεί άμεσα η παραγγελία σας επιλέξτε είδη με υπόλοιπο και ποσότητα μικρότερη ή ίση της διαθέσιμης.
Για αγορές άνω των 80,00 € (αξία ειδών με το ΦΠΑ) σας κάνουμε δώρο τα μεταφορικά.
Η προσφορά ισχύει μόνο για αποστολές την Ελλάδα, δεν αφορά τα έξοδα αντικαταβολής και δεν ισχύει για αποστολές Σαββάτου.
Η προσφορά ισχύει μόνο για αποστολές την Ελλάδα, δεν αφορά τα έξοδα αντικαταβολής και δεν ισχύει για αποστολές Σαββάτου.
Εάν η παραγγελία σας ξεπερνάει τα δύο κιλά (kg) τότε για κάθε επιπλέον κιλό υπάρχει επιβάρυνση 1,00€.




